I’ll continue the series of post about the Jimu platform with a breakdown of the servo.
Because of the similarities between the Jimu servos and the XL-320 servo from Robotis, there will be a lot of parallels between them and I will try to point differences and commonalities that might impact the final usability of the servos.
The first thing to notice about the Jimu servos is the square horn:

Here are a side-by-side comparison between the Jimu (left) and XL-320 (right), first from a side view:

and then from back:

You can see they have very similar structure, with the Jimu servo looking slightly bulkier due to the slot-assembly style.
The Jimu servo has also a codename on the back: UBT-H04 so you might see me referring to this servo by that code (sometimes shortening it to H04).
We first removed the horn. The newer versions of the servo that are in the AstroBot and the BuilderBot use a T9 screw. The older servos like the ones that are included in the Inventor kit use a normal Phillips screw. The horn has exactly the same fixing like the Robotis horn and they can be exchanged. If UBTECH will ever sell spare horns on their own it might be possible to swap the horns on the XL-320 and use the connector parts from Jimu kits.
The servo has 4 long screws accessible from front – exactly in the same way as the XL-320. After removing them we can take the front and back covers and look at the gearbox:
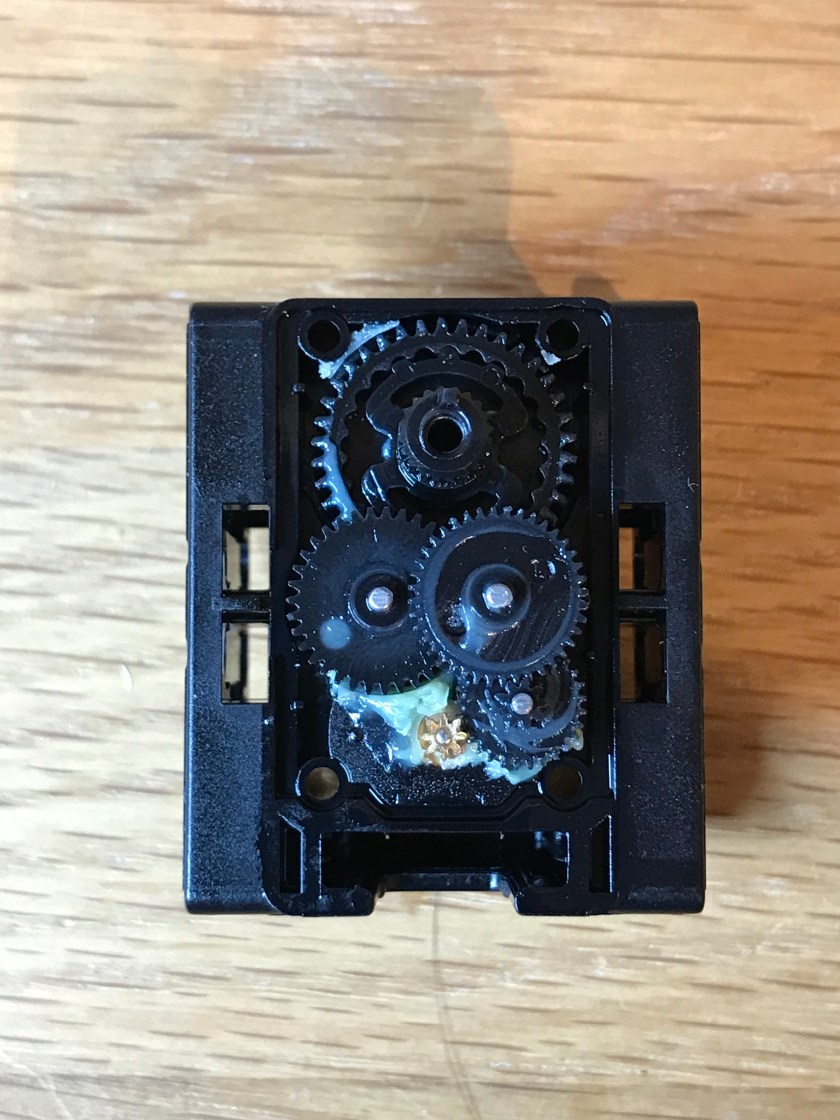
This is absolutely identical with the gears from the XL-320 – there are the same gears and the layout is identical. It’s hard to compare the materials, but they also seem to be the same.
Removing the board / motor assembly from the case we can see it compared with the XL-320:
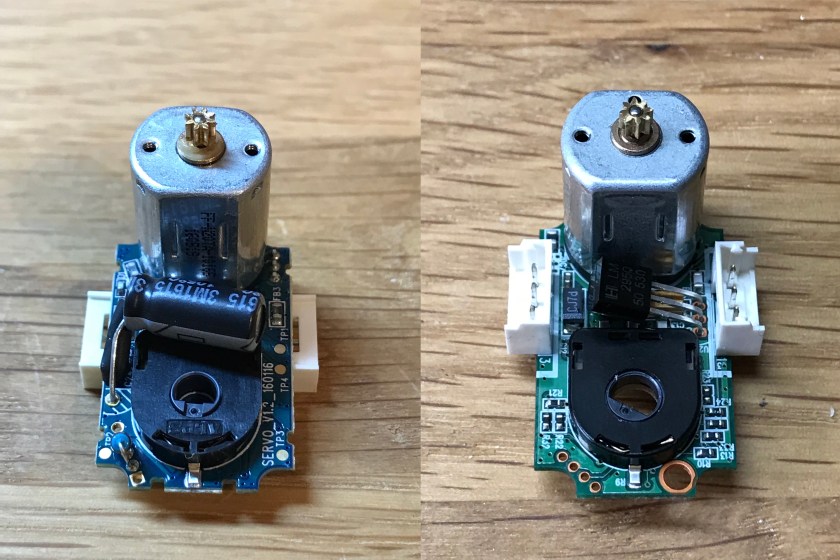
And from the back side:

The first difference to notice is that the processor used in Jimu servo, an Atmel SAM D10 chip versus a STM8S105 chip used in XL-320. This is a little surprising because all the other Jimu hardware (controller, IR sensor, LED, etc.) use STM chips and it is strange that the servomotors are made using a completely different chipset. It is as if the servos are made by another company…
Bellow are the main details for the processors:
| Atmel SAM-D10 | STM8S105K4 | |
|---|---|---|
| Architecture | ARM Cortex M0 32bit | Harvard 8bit |
| Max Frequency | 48 MHz | 16 Mhz |
| RAM | 4k | 2k |
| Flash | 16k | 16k |
| EEPROM | none | 1k |
| Max GPIO | 22 | 25 |
You can see that, with the exception of the EEPROM the Atmel chip has slightly better characteristics, with the most notable one being the clock frequency that is 3 times higher. In principle these processors would be capable of providing very sophisticated functionality – although at the time being (and this is a speculative comment as no technical details have been provided about the firmware in the Jimu servos) the functionality in the XL-320 is far superior to the one in the H04: PID control with adjustable coefficients, torque limitation, temperature control, etc. But, at least on paper all these can be improved with a better firmware.
Comparing the motors in the two servos we see they are very similar: the one on XL-320 is marked as FF-N20PA-10190 and it is relatively easy to find it the specifications; the marking also seems to be quite tidy, indicating a good care and quality motor. The one in the H04 is marked FF-N20TA-10165 and is slightly less tidy. On top of that I could not find any reliable specs for this motor and trying to interpolate from the coding is really difficult as the numbering seems to have very little relation to the speed, voltage or current consumption.
Both designs, for powering the motor use an 5.0V LDO (LM2950 in both cases – the TO-92 that you can see in both devices) with an external transistor to boost the regulated current.
